什时候要用到伺服控制
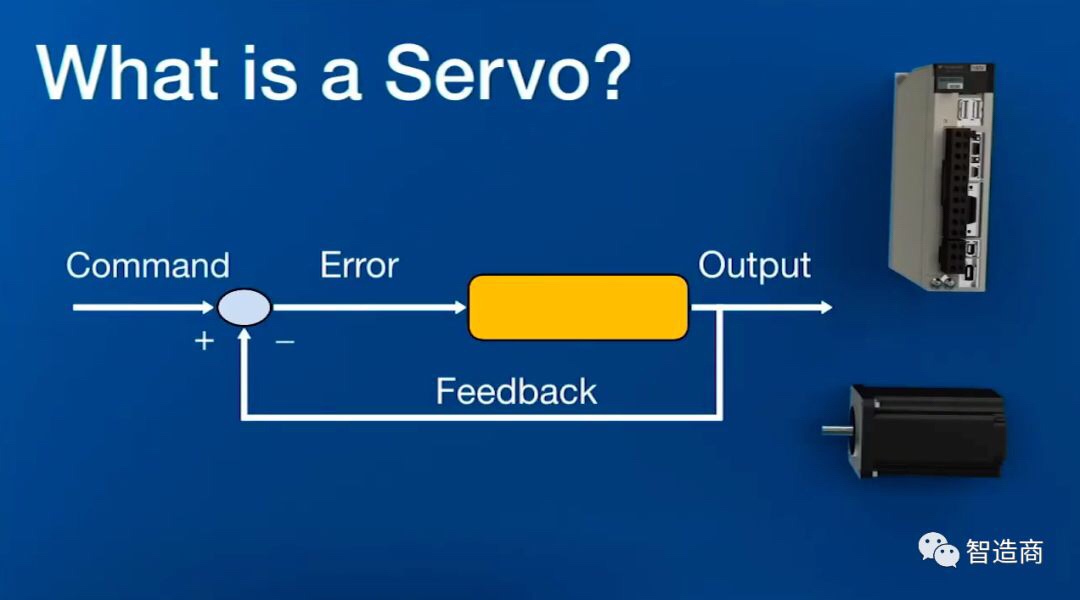
前文书我们提到,伺服是一种为运行操作提供控制的动力传动装置。

PicSource:Rexroth
在其输入侧,是交流、直流电源或液压、气动...等类型的动力供给,和对设备进行位置、速度或力矩控制的信号给定;而其输出侧,则一定是用于驱动设备运行的机械动力,也就是力或者转矩。
PicSource:YASKAWA
伺服装置最独特的部分,就是其内部集成的面向应用对象的反馈机制。系统最终输出的可调机械动力,是基于给定与反馈信号之间的差值而实时计算出来的。

PicSource:YASKAWA
之所以要这样做,原因其实也很简单,就是希望能让系统的应用输出(如:位置、张力...等等)尽可能接近输入侧的给定值。因此,不难看出,使用伺服技术的主要目的,其实就是为了提升设备系统在精度方面的控制性能。
所以,关于本文标题中的“什么时候”,其实就是需要为应用对象提供较高的控制精度的时候。

PicSource:siemens.com/press | SIMOTION
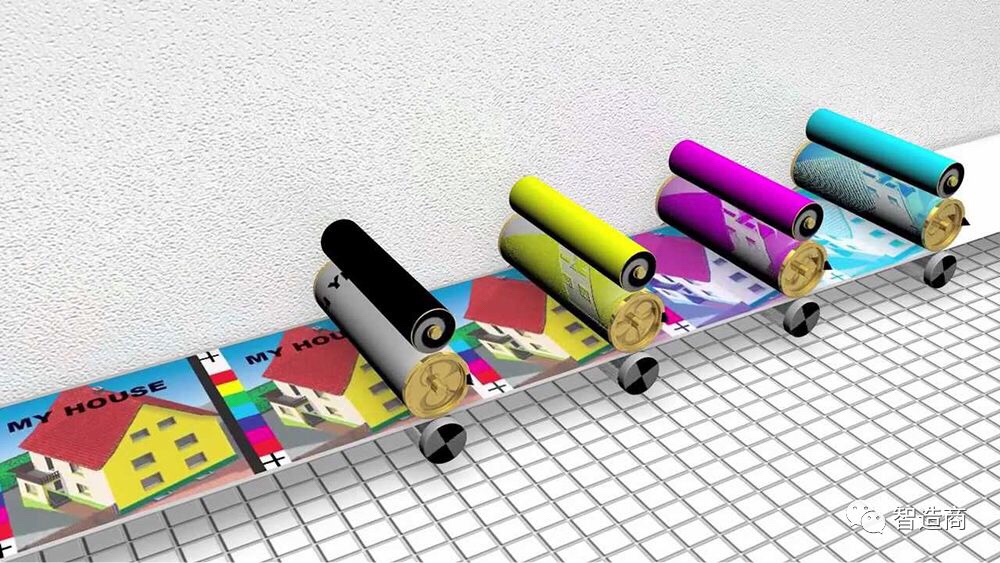
在这些应用中,最常见就要算是的位置控制了。比如:材料的定长裁切、金属加工过程中的刀具控制、各类工业机器人和机械臂、无轴印刷中的多色套印...等等,都需要对设备中的物体(工件、产品、或物料...等)进行精准的位置控制。
我一般会把这些定位应用分为静态和动态两类。
静态定位,指的是系统关注的是物体在目标位置处于静止状态时的定位精度,而对其运动过程中各时间点的位置值并没有十分严格的要求。
举几个例子:
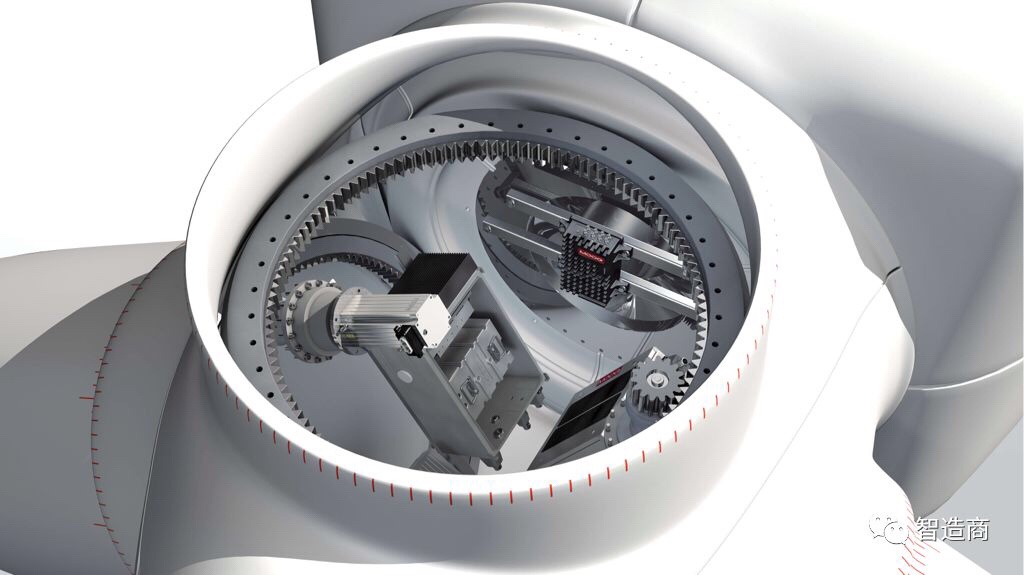
PicSource:MOOG
风力发电机组,需要根据风场的天气、环境和风力状况调整桨叶的迎风角度,以确保将其叶轮的旋转速度控制在安全、有效的范围以内。

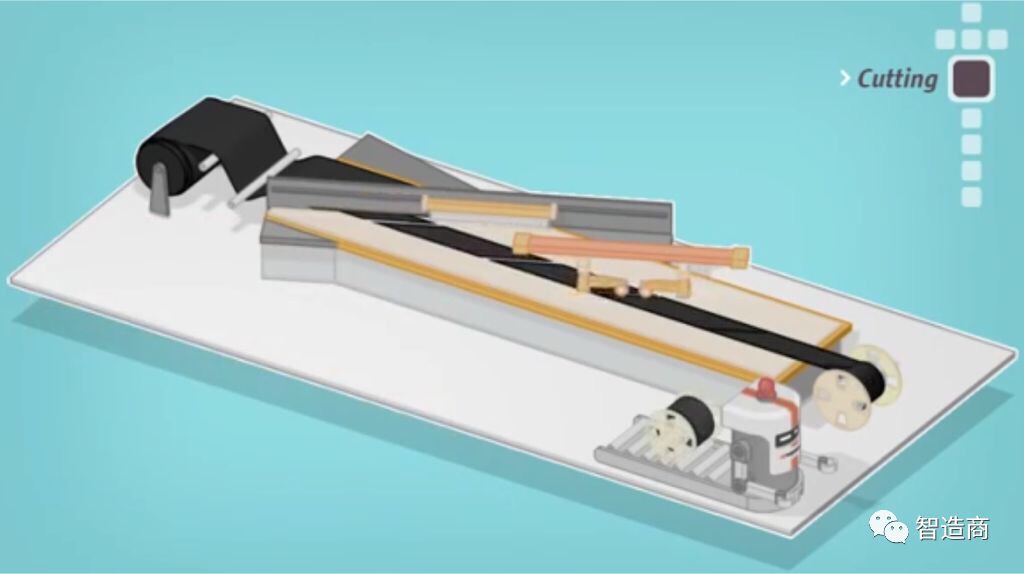
PicSource:Leuze
饮料瓶体套/贴纸质或塑料标签之前,设备需要根据标签材料上的色标指示,在每次标签送进时准确的控制其裁切位置。
PicSource:Hankook
轮胎帘布层材料需要根据特定的纤维纹路方向进行裁剪与缝合,才能够进入到之后轮胎成型的工序。这其中对材料的裁切与缝合位置的控制,也属于静态定位。

PicSource:EXLAR
一些流程行业的应用中,有时会也使用伺服技术,通过调节阀门开闭的位置,实现对液体流量的控制。
...
动态定位,则是要精准的把控物体在整个运动过程中每个时间点的位置值,乃至多个物体之间的相互位置(同步)关系。
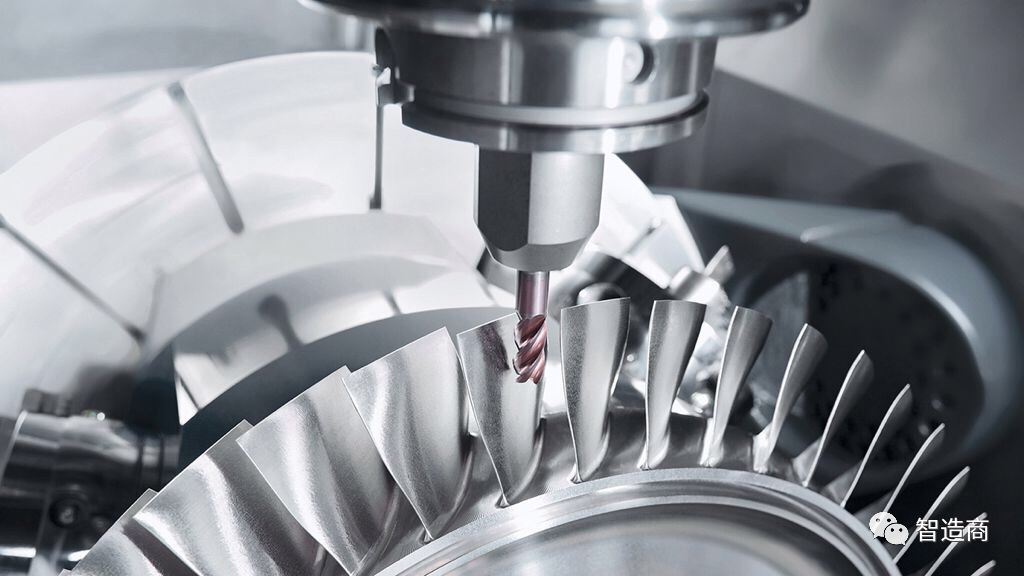
PicSource:DMG MORI
例如:金属加工设备,就是在主轴高速旋转和多个刀具同步运动的过程中,实现了对它们在平面和空间中位置轨迹的精准控制,以完成高品质的工件加工。
PicSource:printingwales.com
再比如:无轴印刷的多色套印,就是在多个印刷辊高速运转的过程中,动态的调整和控制它们之间的角度位置关系,以确保设备达到较高的套印性能品质。
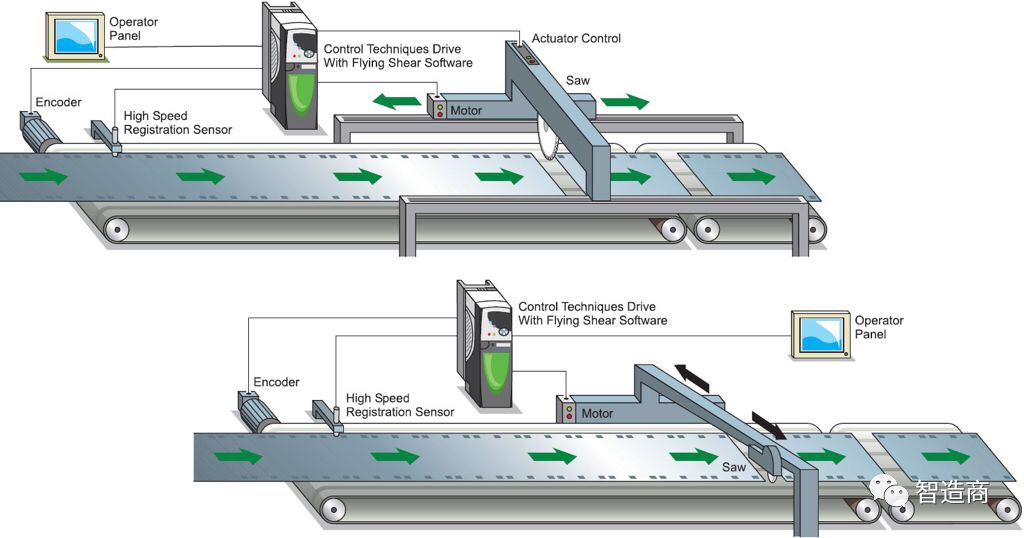
PicSource:Control Techniques
还有一种横向裁切的应用,俗称“飞剪”,这个动作是在物料连续输送不停顿的状态下完成的,其目的主要是为了提升设备运行的节拍效率。此时就至少需要对裁刀在物料输送和与之垂直的两个方向都进行精准的动态位置控制,使其能够在跟随物料进给的过程中,完成各种轮廓样式的横向裁切。
...
PicSource:Gerhard-Schubert
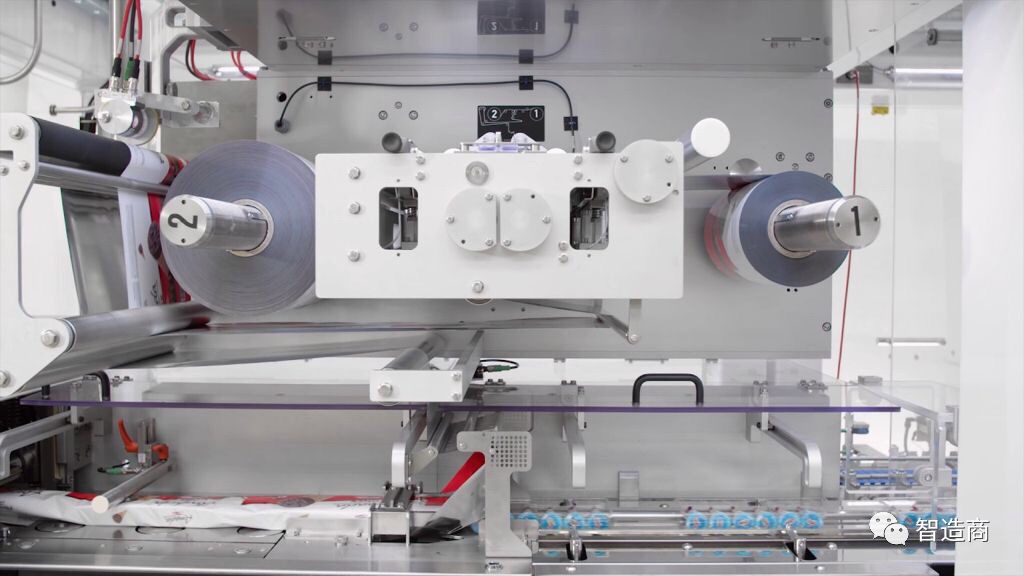
物体或物料的运动速度也可能成为伺服技术的控制对象。其中最典型的例子就是薄膜材料的收放卷了。在这种应用中,通常需要通过伺服传动机构来驱动薄膜料卷的旋转,完成材料的收紧或释放,并在料卷直径不断连续变化的过程中,确保材料的收放速度与其在产线速度的同步。
PicSource:YASKAWA
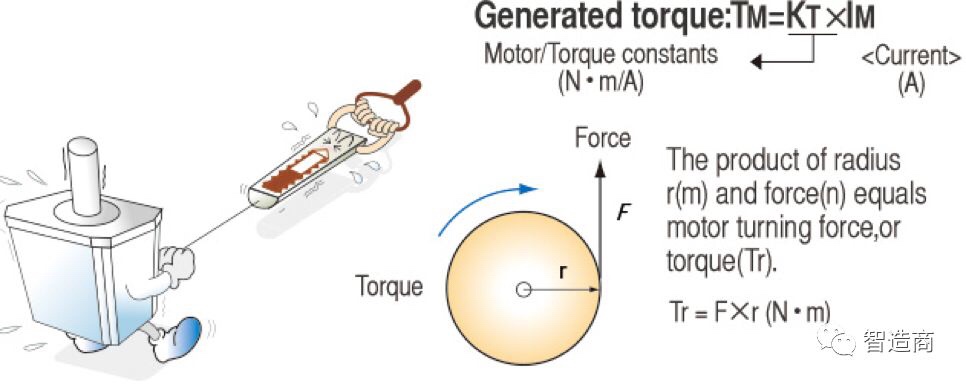
除了以位置和速度作为控制对象以外,在需要对力或力矩进行控制时,也有可能会用到伺服技术。

PicSource:OMRON | FA
还是以材料收放卷应用为例,如果在收放卷过程中还需要对材料的张力进行控制,一般有两种方法。一种比较常见的做法,是使用浮动辊(Dancer),借助摆辊配重或者气缸压力来控制材料张力,此时伺服的工作模式就是速度控制;而另一种,就是通过伺服电机的力矩输出直接控制材料的张力大小,这就需要关闭伺服的位置环和速度环输出,将其工作模式设定为力矩控制。

PicSource:ELAU packaging solutions
饮料灌装/旋盖设备中的瓶盖旋紧操作,也可能会用到伺服的力矩控制模式。借助伺服电机的旋转驱动瓶盖的旋紧动作,通过对其力矩输出的精准控制,使瓶体密封性能达到所需的质量标准,并确保产品的完好无损。
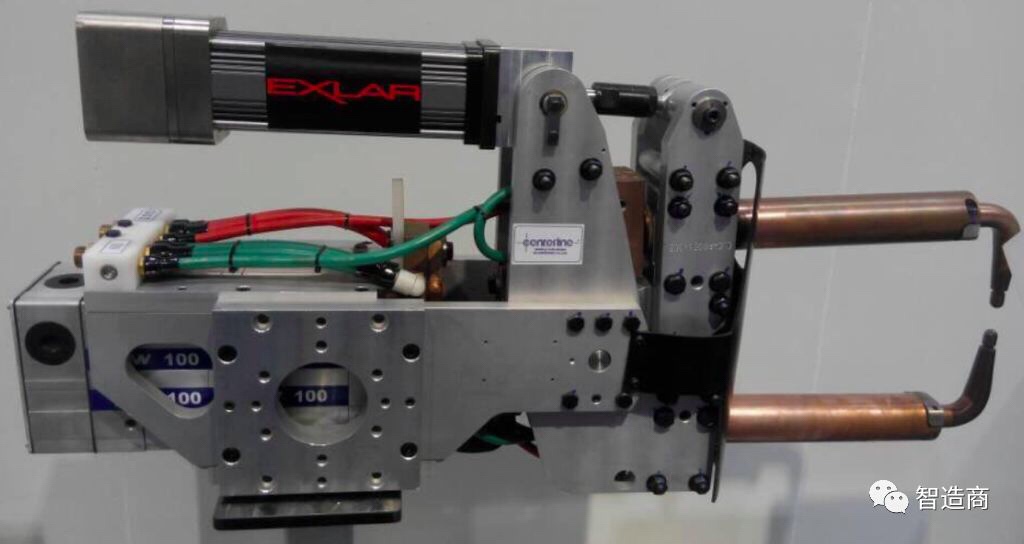
PicSource:EXLAR
此外,我们曾经提到过的,在焊接工装上使用伺服电缸的应用场景中,有时也需要通过对电缸输出推力的控制,来调整焊钳作用在焊点、焊缝伤的压力,以确保稳定可靠的焊接品质。
...

PicSource:ANALOG DEVICES
大家一定注意到了,上述这些要用到伺服技术的应用场合,貌似也是可以通过其他一些技术手段实现的。而这就带出了这样一个问题:
伺服和其他类型的传动控制技术
有着怎样的差别呢?
不急,咱们慢慢聊...


很好的文章。